基于第一节课的知识,你现在应该对机器人是什么以及通常能做什么有了一个大概的了解了。
现在,是时候决定你要构建一个什么类型的机器人了!一般来说,定制一个机器人通常取决于我们的愿景(Vision),就是这个机器人看起来什么样子、用来做什么。机器人的类型可能是无限的,下面这些只是最流行的。
- 陆基轮式、履带式或腿式机器人
- 空中固定翼式、旋翼式或飞艇式
- 水中船式、潜水艇式或游泳机器人
- 多用途混合式
- 固定机械臂或操纵手式
本课程旨在帮助你决定建立什么类型的机器人,以最好的符合你的使命。在第一节课后,既然你已经头脑风暴过要完成什么任务,您现在可以选择最适合你的需求的类型了。下面,你会发现所有主要机器人类型的说明。
陆基
陆基机器人,尤其是轮式机器人,是初学者中最流行的移动机器人,因为它们通常需要最少的投资,同时为机器人提供了很好的实现平台。另一方面,最复杂类型的机器人是人形(类似于人类),因为它需要许多自由度和同步许多电机的运动,并且使用许多传感器。
轮式

移动轮式机器人
轮子是目前为止为一个机器人提供移动性的最常用的方法,并且可以用于多种不同尺寸的机器人和机器人平台。车轮可以是几乎任何大小,从几厘米到三十厘米或者更大。桌面机器人往往有最小的车轮,通常直径小于五厘米。虽然两个图示是最常见的,实际上机器人可具有几乎任何数量的轮子。三轮机器人一般使用两个轮子和一个万向轮,更复杂的两轮机器人可以使用陀螺稳定。一个轮式机器人可以使用任何东西,除了滑动转向(像一辆坦克)。汽车上常用的齿轮齿条式转向需要太多的部件,它的复杂性和成本超过它的大部分优势。
四轮和六轮机器人会使用多个驱动电机(一个连接到每个车轮),这减少了滑移。此外,万向轮的正确使用,可以给机器人显着的移动性优势。 关于构建轮式机器人的常见误解是大型、低成本的直流电机可以推进中型机器人。正如我们将在本系列后面看到的,除了简单的电机,有更多的事情需要考虑。
优点
- 与其他方法相比通常成本要低
- 简单的设计和实现
- 丰富的选择
- 六轮或更多,可与履带式竞争
- 非常适合初学者
缺点
- 可能失去牵引力(滑动)
- 接触面积太小(每个车轮下方只有一个小矩形或线与地面接触)
履带式机器人

移动履带式机器人
履带是坦克所使用的。虽然履带不提供附加的“力”(扭矩),但它们能减少滑动并更均匀地分布机器人的重量,使得它们对于诸如沙子和砾石的松散表面是有用的。此外,具有一定柔性的履带系统可以更好地符合凹凸不平的表面。最后,大多数人倾向于同意坦克履带也为让机器人看起来更酷。
优点
- 与地面的持续接触防止可能发生的车轮滑动
- 均匀分布的重量有助于机器人处理各种表面
- 可用于显着增加机器人的离地间隙,而无需并入更大的驱动轮
缺点
- 当转弯时,有一个作用在地面上的侧向力;这可能会导致坦克履带损坏机器人正在使用的表面,并导致履带磨损
- 没有很多不同的履带可用(机器人通常以履带为基础构建)
- 驱动链轮可能会显着限制可以使用的电机数量
- 增加机械复杂性(惰轮位置和数量,链接数量)和连接
腿式

移动腿式机器人
越来越多的机器人使用腿来移动。对于必须在非常不平坦的地形上行走的机器人来说,腿通常是首选。大多数业余机器人设计有六条腿,允许机器人静态平衡(任何时候平衡在3条腿上); 较少腿的机器人很难平衡。后者需要“动态稳定性”,这意味着如果机器人停止移动中,它可能会倒下。研究人员已经试验了单脚(一条腿的“跳跃”)设计,虽然双足(两条腿),四足(四条腿)和六足(六条腿)是最受欢迎的。
优点
- 接近原来或自然的运动方式
- 可以克服大障碍物和在非常崎岖的地形上行走
缺点
- 增加机械,电子和编码复杂性(不是初学机器人的最简单的方法)
- 电源需求增加,但电池尺寸较小
- 更高的建设成本
空中

移动空中机器人
AUAV(Autonomous Unmanned Aerial Vehicle,自主无人机)非常有吸引力,特别是在许多机器人爱好者的能力范围内。然而,构建自主无人驾驶飞行器的风险仍然要高于其优势,特别是如果你是初学者。所以考虑飞行器时,大多数爱好者仍然使用现有的商业遥控飞机。在专业方面,飞机如美国军队“捕食者”最初是半自主的,虽然近年来捕食者飞机有自主飞行任务。
优点
- 遥控飞机已经存在了几十年(至少对于机械部分有一个大的社区)
- 非常适合监视
缺点
- 整个投资可能在一次炸机中丢失
- 为自主控制提供帮助的机器人社区非常有限
水中

移动水下机器人
越来越多的爱好者、机构和公司正在开发无人水下航行器。虽然在使水下机器人吸引更广泛的机器人社区方面有许多障碍尚未克服,但近年来,几家公司已成功商业化水池清洁“机器人”。水下车辆可以使用压载物(压缩空气和淹没的隔间)、推进器、尾部和淹没的鳍甚至翼部。其他水上机器人如水池清洁者也是有用的商业产品。
优点
- 我们星球的大多数是水,所以有很多值得探索和发现的东西
- 设计几乎保证是独一无二的
- 可在水池中使用和/或测试
缺点
- 机器人可能因为许多原因丢失(下沉,泄漏,纠缠…)
- 大多数电子部件不喜欢水(还要考虑在潜水后机器人电子设备的水隔离问题)
- 超过10米或以上的深度需要大量的研究和投资
- 只有非常有限的机器人社区能提供帮助
- 有限的无线通信选项
多用途混合式
移动多用途机器人
你的机器人的想法可能不会很好地吻合上述任何类别的定义,或可能包含几个不同的功能部分。再次注意,本指南适用于移动机器人,而不是固定或永久固定设计(机器人手臂和夹具除外)。在构建混合设计时,考虑使用模块化设计(每个功能部分可以分开测试)是明智的。杂项设计可以包括气垫船、蛇状设计、炮塔等。
优点
- 专为满足特定需求而设计和制造
- 多任务,可以由模块组成
- 可以提高功能和多功能性
缺点
- 可能增加复杂性和成本
- 通常零件必须定制设计和制造
机械臂和夹具

并不移动的机械臂
虽然这些不属于移动机器人的范畴,但是机器人领域基本上从机械臂和末端执行器(附接到臂末端的装置,例如夹具、电磁体等)开始。机械臂和夹具是机器人与其正在探索的环境进行交互的最佳方式。简单的机器人手臂可以只有一个自由度,而更复杂的手臂可以有十几个或更多的自由度。
优点
- 设计可能从非常简单到非常复杂
- 3或4个自由度的机器人手臂(两个关节和转动底座)非常容易制作
缺点
- 除安装在移动平台外,一般需要固定
- 建造成本与所需能力成正比
练习用例
在我们的例子里,我们选择了构建一个机器人以全面了解机器人相关技术。在这种情况下,可以容纳各种传感器和夹具的可编程履带平台看起来很理想,特别是因为我们认为坦克履带比车轮酷得多。
为了降低成本,我们选择构建一个能够在室内和桌面上行走的小型桌面机器人。我们还考虑到没有很多履带的事实,为了保持简单,我们只考虑一个驱动链轮和单个惰轮链轮系统,因为机器人重量将非常轻,这不应该是一个问题。
下面的CAD总结了到目前为止我们描述的特征。
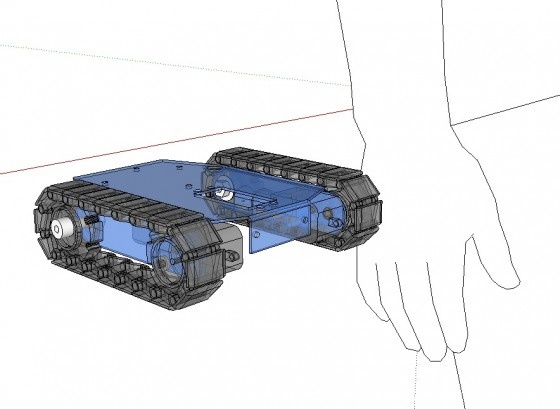
Preliminary rover CAD with human hand
接下来,我们将为您的机器人选择正确的执行装置(例如电机)。